Reasoner.h File Reference
#include <memory>#include "knowrob/PropertyTree.h"#include "knowrob/terms/Atom.h"#include "knowrob/DataSource.h"#include "knowrob/DataSourceHandler.h"#include "knowrob/storage/Storage.h"#include "knowrob/plugins/NamedPlugin.h"#include "ReasonerError.h"
Include dependency graph for Reasoner.h:

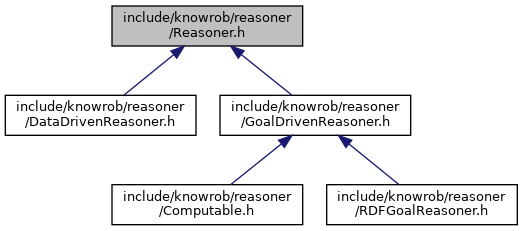
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | knowrob::Reasoner |
Namespaces | |
| knowrob | |
Macros | |
| #define | REASONER_PLUGIN(classType, pluginName) |
Macro Definition Documentation
◆ REASONER_PLUGIN
| #define REASONER_PLUGIN | ( | classType, | |
| pluginName | |||
| ) |
Value:
extern "C" { \
std::shared_ptr<knowrob::Reasoner> knowrob_createPlugin(std::string_view pluginID) \
{ return std::make_shared<classType>(pluginID); } \
const char* knowrob_getPluginName() { return pluginName; } }
Define a reasoner plugin. The macro generates two functions that are used as entry points for loading the plugin. First, a factory function is defined that creates instances of classType. This will only work when classType has a single argument constructor that accepts a string as argument (the reasoner instance ID). Second, a function is generated that exposes the plugin name.
- Parameters
-
classType the type of the reasoner, must be a subclass of IReasoner pluginName a plugin identifier, e.g. the name of the reasoner type.
Definition at line 117 of file Reasoner.h.