#include <Answer.h>
Public Member Functions | |
| Answer () | |
| Answer (const Answer &other) | |
| auto & | frame () const |
| void | setFrame (const std::shared_ptr< GraphSelector > &frame) |
| void | applyFrame (const GraphSelector &frame) |
| bool | isNegative () const |
| bool | isPositive () const |
| bool | isUncertain () const |
| bool | isCertain () const |
| void | setIsUncertain (bool val, std::optional< double > confidence) |
| bool | isOccasionallyTrue () const |
| bool | isAllwaysTrue () const |
| void | setIsOccasionallyTrue (bool val) |
| void | setReasonerTerm (const AtomPtr &reasonerTerm) |
| auto & | reasonerTerm () const |
| size_t | hashOfAnswer () const |
| std::string | stringFormOfAnswer () const |
| std::string | humanReadableForm () const |
| Answer () | |
| Answer (const Answer &other) | |
| auto & | frame () const |
| void | setFrame (const std::shared_ptr< GraphSelector > &frame) |
| void | applyFrame (const GraphSelector &frame) |
| bool | isNegative () const |
| bool | isPositive () const |
| bool | isUncertain () const |
| bool | isCertain () const |
| void | setIsUncertain (bool val, std::optional< double > confidence) |
| bool | isOccasionallyTrue () const |
| bool | isAllwaysTrue () const |
| void | setIsOccasionallyTrue (bool val) |
| void | setReasonerTerm (const AtomPtr &reasonerTerm) |
| auto & | reasonerTerm () const |
| size_t | hashOfAnswer () const |
| std::string | stringFormOfAnswer () const |
| std::string | humanReadableForm () const |
 Public Member Functions inherited from knowrob::Token Public Member Functions inherited from knowrob::Token | |
| Token (TokenType tokenType) | |
| virtual | ~Token ()=default |
| TokenType | tokenType () const |
| size_t | hash () const |
| std::string | stringForm () const |
| bool | isControlToken () const |
| bool | isAnswerToken () const |
| bool | indicatesEndOfEvaluation () const |
| void | write (std::ostream &os) const override |
| Token (TokenType tokenType) | |
| virtual | ~Token ()=default |
| TokenType | tokenType () const |
| size_t | hash () const |
| std::string | stringForm () const |
| bool | isControlToken () const |
| bool | isAnswerToken () const |
| bool | indicatesEndOfEvaluation () const |
| void | write (std::ostream &os) const override |
| Public Member Functions inherited from knowrob::Printable | |
| virtual | ~Printable ()=default |
| virtual std::string | format () const |
| virtual | ~Printable ()=default |
| virtual std::string | format () const |
Protected Member Functions | |
| void | setIsPositive (bool val) |
| void | setIsNegative (bool val) |
| void | setIsPositive (bool val) |
| void | setIsNegative (bool val) |
Protected Attributes | |
| std::shared_ptr< GraphSelector > | frame_ |
| AtomPtr | reasonerTerm_ |
| bool | isPositive_ = false |
| bool | isNegative_ = false |
| Protected Attributes inherited from knowrob::Token | |
| TokenType | tokenType_ |
| bool | isTerminalToken_ = false |
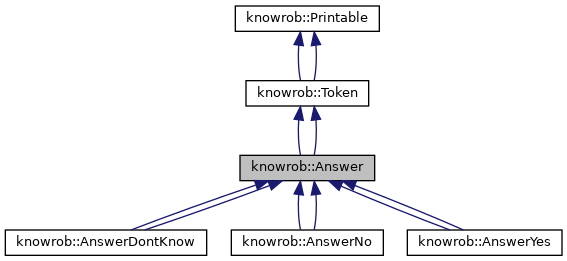
Detailed Description
The answer to a (sub)-query. It can be positive, negative or neither.
Constructor & Destructor Documentation
◆ Answer() [1/4]
◆ Answer() [2/4]
◆ Answer() [3/4]
◆ Answer() [4/4]
Member Function Documentation
◆ applyFrame() [1/2]
| void Answer::applyFrame | ( | const GraphSelector & | frame | ) |
Apply a frame to this answer.
- Parameters
-
frame a graph selector.
Definition at line 25 of file Answer.cpp.
◆ applyFrame() [2/2]
| void knowrob::Answer::applyFrame | ( | const GraphSelector & | frame | ) |
Apply a frame to this answer.
- Parameters
-
frame a graph selector.
◆ frame() [1/2]
|
inline |
The answer is framed in the context of a graph selector which determines the set of graphs in which the answer is valid. This can be used to e.g. address graphs that represent the world state from the perspective of a specific agent, or a specific point in time.
- Returns
- a graph selector.
Definition at line 35 of file Answer.h.
◆ frame() [2/2]
|
inline |
The answer is framed in the context of a graph selector which determines the set of graphs in which the answer is valid. This can be used to e.g. address graphs that represent the world state from the perspective of a specific agent, or a specific point in time.
- Returns
- a graph selector.
Definition at line 35 of file Answer.h.
◆ hashOfAnswer() [1/2]
| size_t Answer::hashOfAnswer | ( | ) | const |
- Returns
- the hash of this answer.
Definition at line 64 of file Answer.cpp.
◆ hashOfAnswer() [2/2]
| size_t knowrob::Answer::hashOfAnswer | ( | ) | const |
- Returns
- the hash of this answer.
◆ humanReadableForm() [1/2]
| std::string Answer::humanReadableForm | ( | ) | const |
- Returns
- a human readable string representation of this answer.
Definition at line 101 of file Answer.cpp.
◆ humanReadableForm() [2/2]
| std::string knowrob::Answer::humanReadableForm | ( | ) | const |
- Returns
- a human readable string representation of this answer.
◆ isAllwaysTrue() [1/2]
|
inline |
◆ isAllwaysTrue() [2/2]
|
inline |
◆ isCertain() [1/2]
|
inline |
◆ isCertain() [2/2]
|
inline |
◆ isNegative() [1/2]
|
inline |
◆ isNegative() [2/2]
|
inline |
◆ isOccasionallyTrue() [1/2]
| bool Answer::isOccasionallyTrue | ( | ) | const |
- Returns
- true if truth of this answer is uncertain.
Definition at line 45 of file Answer.cpp.
◆ isOccasionallyTrue() [2/2]
| bool knowrob::Answer::isOccasionallyTrue | ( | ) | const |
- Returns
- true if truth of this answer is uncertain.
◆ isPositive() [1/2]
|
inline |
◆ isPositive() [2/2]
|
inline |
◆ isUncertain() [1/2]
| bool Answer::isUncertain | ( | ) | const |
- Returns
- true if truth of this answer is uncertain.
Definition at line 35 of file Answer.cpp.
◆ isUncertain() [2/2]
| bool knowrob::Answer::isUncertain | ( | ) | const |
- Returns
- true if truth of this answer is uncertain.
◆ reasonerTerm() [1/2]
|
inline |
◆ reasonerTerm() [2/2]
|
inline |
◆ setFrame() [1/2]
| void Answer::setFrame | ( | const std::shared_ptr< GraphSelector > & | frame | ) |
Assign a graph selector to this answer.
- Parameters
-
frame a graph selector.
Definition at line 17 of file Answer.cpp.
◆ setFrame() [2/2]
| void knowrob::Answer::setFrame | ( | const std::shared_ptr< GraphSelector > & | frame | ) |
Assign a graph selector to this answer.
- Parameters
-
frame a graph selector.
◆ setIsNegative() [1/2]
|
inlineprotected |
◆ setIsNegative() [2/2]
|
inlineprotected |
◆ setIsOccasionallyTrue() [1/2]
| void Answer::setIsOccasionallyTrue | ( | bool | val | ) |
Mark this answer as occasionally true.
- Parameters
-
val true if the answer is occasionally true.
Definition at line 60 of file Answer.cpp.
◆ setIsOccasionallyTrue() [2/2]
| void knowrob::Answer::setIsOccasionallyTrue | ( | bool | val | ) |
Mark this answer as occasionally true.
- Parameters
-
val true if the answer is occasionally true.
◆ setIsPositive() [1/2]
|
inlineprotected |
◆ setIsPositive() [2/2]
|
inlineprotected |
◆ setIsUncertain() [1/2]
| void Answer::setIsUncertain | ( | bool | val, |
| std::optional< double > | confidence | ||
| ) |
Mark this answer as uncertain by modification of the associated frame.
- Parameters
-
val true if the answer is uncertain. confidence the confidence value.
Definition at line 49 of file Answer.cpp.
◆ setIsUncertain() [2/2]
| void knowrob::Answer::setIsUncertain | ( | bool | val, |
| std::optional< double > | confidence | ||
| ) |
Mark this answer as uncertain by modification of the associated frame.
- Parameters
-
val true if the answer is uncertain. confidence the confidence value.
◆ setReasonerTerm() [1/2]
|
inline |
◆ setReasonerTerm() [2/2]
|
inline |
◆ stringFormOfAnswer() [1/2]
| std::string Answer::stringFormOfAnswer | ( | ) | const |
◆ stringFormOfAnswer() [2/2]
| std::string knowrob::Answer::stringFormOfAnswer | ( | ) | const |
- Returns
- a string representation of this answer.
Member Data Documentation
◆ frame_
|
protected |
◆ isNegative_
◆ isPositive_
◆ reasonerTerm_
The documentation for this class was generated from the following files:
- build/_CPack_Packages/Linux/DEB/knowrob-2.1.0-Linux/usr/include/knowrob/queries/Answer.h
- src/queries/Answer.cpp