#include <RDFGoalReasoner.h>
Public Member Functions | |
| RDFGoalReasoner () | |
| virtual | ~RDFGoalReasoner ()=default |
| virtual bool | evaluate (RDFGoalPtr query)=0 |
| bool | evaluate (GoalPtr query) override |
| RDFGoalReasoner () | |
| virtual | ~RDFGoalReasoner ()=default |
| virtual bool | evaluate (RDFGoalPtr query)=0 |
| bool | evaluate (GoalPtr query) override |
 Public Member Functions inherited from knowrob::GoalDrivenReasoner Public Member Functions inherited from knowrob::GoalDrivenReasoner | |
| GoalDrivenReasoner () | |
| bool | hasFeature (GoalDrivenReasonerFeature feature) const |
| void | enableFeature (GoalDrivenReasonerFeature feature) |
| bool | isRelationDefined (const PredicateIndicator &indicator) |
| bool | isClassDefined (const std::string_view &iri) |
| void | defineRelation (const PredicateIndicator &indicator) |
| void | defineRelation (const IRIAtomPtr &iri) |
| void | undefineRelation (const PredicateIndicator &indicator) |
| void | defineClass (const IRIAtomPtr &iri) |
| void | undefineClass (const IRIAtomPtr &iri) |
| const auto & | definedRelations () const |
| const auto & | definedClasses () const |
| GoalDrivenReasoner () | |
| bool | hasFeature (GoalDrivenReasonerFeature feature) const |
| void | enableFeature (GoalDrivenReasonerFeature feature) |
| bool | isRelationDefined (const PredicateIndicator &indicator) |
| bool | isClassDefined (const std::string_view &iri) |
| void | defineRelation (const PredicateIndicator &indicator) |
| void | defineRelation (const IRIAtomPtr &iri) |
| void | undefineRelation (const PredicateIndicator &indicator) |
| void | defineClass (const IRIAtomPtr &iri) |
| void | undefineClass (const IRIAtomPtr &iri) |
| const auto & | definedRelations () const |
| const auto & | definedClasses () const |
| Public Member Functions inherited from knowrob::Reasoner | |
| Reasoner () | |
| virtual | ~Reasoner ()=default |
| auto & | reasonerName () const |
| auto | reasonerLanguage () const |
| auto | storage () const |
| template<class T > | |
| std::shared_ptr< T > | getTypedStorage () const |
| ReasonerManager & | reasonerManager () const |
| void | pushWork (const std::function< void(void)> &fn) |
| void | setStorage (const StoragePtr &storage) |
| virtual bool | initializeReasoner (const PropertyTree &ptree)=0 |
| virtual void | unload () |
| Reasoner () | |
| virtual | ~Reasoner ()=default |
| auto & | reasonerName () const |
| auto | reasonerLanguage () const |
| auto | storage () const |
| template<class T > | |
| std::shared_ptr< T > | getTypedStorage () const |
| ReasonerManager & | reasonerManager () const |
| void | pushWork (const std::function< void(void)> &fn) |
| void | setStorage (const StoragePtr &storage) |
| virtual bool | initializeReasoner (const PropertyTree &ptree)=0 |
| virtual void | unload () |
| Public Member Functions inherited from knowrob::DataSourceHandler | |
| DataSourceHandler ()=default | |
| virtual | ~DataSourceHandler ()=default |
| void | addDataHandler (const std::string &format, const DataSourceLoader &fn) |
| bool | loadDataSource (const DataSourcePtr &dataSource) |
| bool | hasDataHandler (const DataSourcePtr &dataSource) const |
| DataSourceHandler ()=default | |
| virtual | ~DataSourceHandler ()=default |
| void | addDataHandler (const std::string &format, const DataSourceLoader &fn) |
| bool | loadDataSource (const DataSourcePtr &dataSource) |
| bool | hasDataHandler (const DataSourcePtr &dataSource) const |
Additional Inherited Members | |
| Protected Member Functions inherited from knowrob::DataSourceHandler | |
| virtual bool | loadDataSourceWithUnknownFormat (const DataSourcePtr &) |
| virtual bool | loadDataSourceWithUnknownFormat (const DataSourcePtr &) |
| Protected Attributes inherited from knowrob::GoalDrivenReasoner | |
| std::set< PredicateIndicator > | definedRelations_ |
| std::set< PredicateIndicator > | definedClasses_ |
| int | features_ |
| Protected Attributes inherited from knowrob::DataSourceHandler | |
| std::map< std::string, DataSourceLoader > | dataSourceHandler_ |
Detailed Description
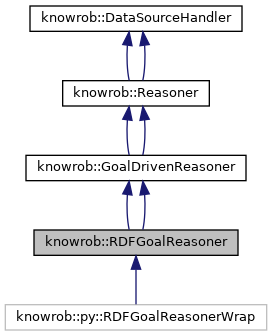
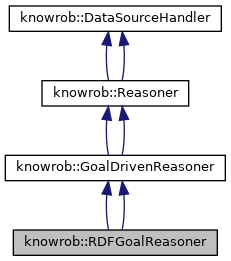
A reasoner that evaluates RDF goals.
Definition at line 16 of file RDFGoalReasoner.h.
Constructor & Destructor Documentation
◆ RDFGoalReasoner() [1/2]
|
inline |
Definition at line 18 of file RDFGoalReasoner.h.
◆ ~RDFGoalReasoner() [1/2]
|
virtualdefault |
◆ RDFGoalReasoner() [2/2]
|
inline |
Definition at line 18 of file RDFGoalReasoner.h.
◆ ~RDFGoalReasoner() [2/2]
|
virtualdefault |
Member Function Documentation
◆ evaluate() [1/4]
|
overridevirtual |
Evaluate a query with a reasoner. The query is represented by a formula, a context and an answer queue where results of the reasoning process can be added. The evaluation of the query must be performed synchronously, i.e. the answer queue must be filled before the function returns. A reasoner may instead throw an exception if the query cannot be evaluated, or return false to also indicate an error status.
- Parameters
-
query the query to evaluate.
- Returns
- true on success, false otherwise.
Implements knowrob::GoalDrivenReasoner.
Definition at line 11 of file RDFGoalReasoner.cpp.
◆ evaluate() [2/4]
|
overridevirtual |
Evaluate a query with a reasoner. The query is represented by a formula, a context and an answer queue where results of the reasoning process can be added. The evaluation of the query must be performed synchronously, i.e. the answer queue must be filled before the function returns. A reasoner may instead throw an exception if the query cannot be evaluated, or return false to also indicate an error status.
- Parameters
-
query the query to evaluate.
- Returns
- true on success, false otherwise.
Implements knowrob::GoalDrivenReasoner.
◆ evaluate() [3/4]
|
pure virtual |
Evaluate an RDF goal.
- Parameters
-
query the goal to evaluate.
- Returns
- true if the goal is satisfied, false otherwise.
◆ evaluate() [4/4]
|
pure virtual |
Evaluate an RDF goal.
- Parameters
-
query the goal to evaluate.
- Returns
- true if the goal is satisfied, false otherwise.
The documentation for this class was generated from the following files:
- build/_CPack_Packages/Linux/DEB/knowrob-2.1.0-Linux/usr/include/knowrob/reasoner/RDFGoalReasoner.h
- src/reasoner/RDFGoalReasoner.cpp