#include <TriplePattern.h>
Public Member Functions | |
| TriplePattern (const Triple &triple, bool isNegated=false) | |
| TriplePattern (const PredicatePtr &predicate, bool isNegated=false) | |
| TriplePattern (const TermPtr &s, const TermPtr &p, const TermPtr &o, bool isNegated=false) | |
| void | setTripleFrame (const GraphSelector &frame) |
| void | getTripleFrame (GraphSelector &frame) const |
| auto & | subjectTerm () const |
| void | setSubjectTerm (const TermPtr &subjectTerm) |
| auto & | propertyTerm () const |
| auto & | objectTerm () const |
| void | setObjectTerm (const TermPtr &objectTerm) |
| auto & | objectVariable () const |
| void | setObjectVariable (const VariablePtr &objectVariable) |
| auto & | graphTerm () const |
| void | setGraphTerm (const groundable< Atom > &graphTerm) |
| void | setGraphName (const std::string_view &graphName) |
| auto & | perspectiveTerm () const |
| void | setPerspectiveTerm (const groundable< Atom > &perspectiveTerm) |
| auto & | beginTerm () const |
| void | setBeginTerm (const groundable< Double > &beginTerm) |
| auto & | endTerm () const |
| void | setEndTerm (const groundable< Double > &endTerm) |
| auto & | confidenceTerm () const |
| void | setConfidenceTerm (const groundable< Double > &confidenceTerm) |
| auto | objectOperator () const |
| void | setObjectOperator (FilterType objectOperator) |
| auto & | isOccasionalTerm () const |
| void | setIsOccasionalTerm (const groundable< Numeric > &isOccasional) |
| auto & | isUncertainTerm () const |
| void | setIsUncertainTerm (const groundable< Numeric > &isUncertain) |
| bool | isOptional () const |
| void | setIsOptional (bool isOptional) |
| uint32_t | numVariables () const override |
| std::vector< VariablePtr > | getVariables (bool includeObjectVar=true) const |
| bool | filter (const Triple &triple) const |
| bool | instantiateInto (Triple &triple, const std::shared_ptr< const Bindings > &bindings=Bindings::emptyBindings()) const |
| TriplePattern (const Triple &triple, bool isNegated=false) | |
| TriplePattern (const PredicatePtr &predicate, bool isNegated=false) | |
| TriplePattern (const TermPtr &s, const TermPtr &p, const TermPtr &o, bool isNegated=false) | |
| void | setTripleFrame (const GraphSelector &frame) |
| void | getTripleFrame (GraphSelector &frame) const |
| auto & | subjectTerm () const |
| void | setSubjectTerm (const TermPtr &subjectTerm) |
| auto & | propertyTerm () const |
| auto & | objectTerm () const |
| void | setObjectTerm (const TermPtr &objectTerm) |
| auto & | objectVariable () const |
| void | setObjectVariable (const VariablePtr &objectVariable) |
| auto & | graphTerm () const |
| void | setGraphTerm (const groundable< Atom > &graphTerm) |
| void | setGraphName (const std::string_view &graphName) |
| auto & | perspectiveTerm () const |
| void | setPerspectiveTerm (const groundable< Atom > &perspectiveTerm) |
| auto & | beginTerm () const |
| void | setBeginTerm (const groundable< Double > &beginTerm) |
| auto & | endTerm () const |
| void | setEndTerm (const groundable< Double > &endTerm) |
| auto & | confidenceTerm () const |
| void | setConfidenceTerm (const groundable< Double > &confidenceTerm) |
| auto | objectOperator () const |
| void | setObjectOperator (FilterType objectOperator) |
| auto & | isOccasionalTerm () const |
| void | setIsOccasionalTerm (const groundable< Numeric > &isOccasional) |
| auto & | isUncertainTerm () const |
| void | setIsUncertainTerm (const groundable< Numeric > &isUncertain) |
| bool | isOptional () const |
| void | setIsOptional (bool isOptional) |
| uint32_t | numVariables () const override |
| std::vector< VariablePtr > | getVariables (bool includeObjectVar=true) const |
| bool | filter (const Triple &triple) const |
| bool | instantiateInto (Triple &triple, const std::shared_ptr< const Bindings > &bindings=Bindings::emptyBindings()) const |
 Public Member Functions inherited from knowrob::FirstOrderLiteral Public Member Functions inherited from knowrob::FirstOrderLiteral | |
| FirstOrderLiteral (const PredicatePtr &predicate, bool isNegative) | |
| const auto & | predicate () const |
| auto | isNegated () const |
| void | setIsNegated (bool isNegated) |
| auto & | functor () const |
| auto | arity () const |
| void | write (std::ostream &os) const override |
| FirstOrderLiteral (const PredicatePtr &predicate, bool isNegative) | |
| const auto & | predicate () const |
| auto | isNegated () const |
| void | setIsNegated (bool isNegated) |
| auto & | functor () const |
| auto | arity () const |
| void | write (std::ostream &os) const override |
| Public Member Functions inherited from knowrob::Printable | |
| virtual | ~Printable ()=default |
| virtual std::string | format () const |
| virtual | ~Printable ()=default |
| virtual std::string | format () const |
Static Public Member Functions | |
| static std::shared_ptr< Predicate > | getRDFPredicate (const PredicatePtr &predicate) |
| static std::shared_ptr< Predicate > | getRDFPredicate (const PredicatePtr &predicate) |
Static Protected Member Functions | |
| static std::shared_ptr< Atom > | getGraphTerm (const std::string_view &graphName) |
| static std::shared_ptr< Predicate > | getRDFPredicate (const TermPtr &s, const TermPtr &p, const TermPtr &o) |
| static std::shared_ptr< Predicate > | getRDFPredicate (const Triple &data) |
| static std::shared_ptr< Atom > | getGraphTerm (const std::string_view &graphName) |
| static std::shared_ptr< Predicate > | getRDFPredicate (const TermPtr &s, const TermPtr &p, const TermPtr &o) |
| static std::shared_ptr< Predicate > | getRDFPredicate (const Triple &data) |
Protected Attributes | |
| TermPtr | subjectTerm_ |
| TermPtr | propertyTerm_ |
| TermPtr | objectTerm_ |
| VariablePtr | objectVariable_ |
| FilterType | objectOperator_ |
| bool | isOptional_ |
| groundable< Atom > | graphTerm_ |
| groundable< Atom > | perspectiveTerm_ |
| groundable< Double > | beginTerm_ |
| groundable< Double > | endTerm_ |
| groundable< Double > | confidenceTerm_ |
| groundable< Numeric > | isOccasional_ |
| groundable< Numeric > | isUncertain_ |
| Protected Attributes inherited from knowrob::FirstOrderLiteral | |
| const PredicatePtr | predicate_ |
| bool | isNegated_ |
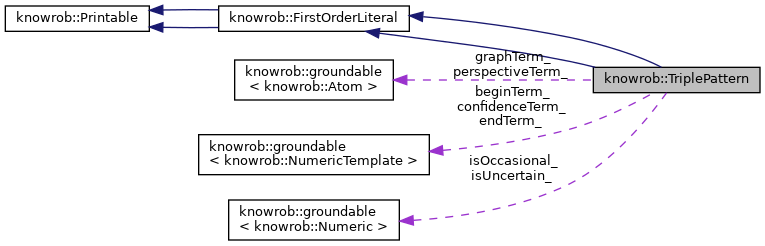
Detailed Description
A triple expression where subject, predicate and object are represented as a term, and an additional unary operator can be applied to the object.
Definition at line 43 of file TriplePattern.h.
Constructor & Destructor Documentation
◆ TriplePattern() [1/6]
|
explicit |
Copy char data of StatementData object into Term data structures.
- Parameters
-
triple a triple. isNegated a value of true refers to the statement being false.
Definition at line 39 of file TriplePattern.cpp.
◆ TriplePattern() [2/6]
|
explicit |
- Parameters
-
predicate a predicate with two arguments. isNegated a value of true refers to the statement being false.
Definition at line 69 of file TriplePattern.cpp.
◆ TriplePattern() [3/6]
| TriplePattern::TriplePattern | ( | const TermPtr & | s, |
| const TermPtr & | p, | ||
| const TermPtr & | o, | ||
| bool | isNegated = false |
||
| ) |
- Parameters
-
s the subject term. p the property term. o the object term. isNegated a value of true refers to the statement being false.
Definition at line 78 of file TriplePattern.cpp.
◆ TriplePattern() [4/6]
|
explicit |
Copy char data of StatementData object into Term data structures.
- Parameters
-
triple a triple. isNegated a value of true refers to the statement being false.
◆ TriplePattern() [5/6]
|
explicit |
- Parameters
-
predicate a predicate with two arguments. isNegated a value of true refers to the statement being false.
◆ TriplePattern() [6/6]
| knowrob::TriplePattern::TriplePattern | ( | const TermPtr & | s, |
| const TermPtr & | p, | ||
| const TermPtr & | o, | ||
| bool | isNegated = false |
||
| ) |
- Parameters
-
s the subject term. p the property term. o the object term. isNegated a value of true refers to the statement being false.
Member Function Documentation
◆ beginTerm() [1/2]
|
inline |
◆ beginTerm() [2/2]
|
inline |
◆ confidenceTerm() [1/2]
|
inline |
◆ confidenceTerm() [2/2]
|
inline |
◆ endTerm() [1/2]
|
inline |
◆ endTerm() [2/2]
|
inline |
◆ filter() [1/2]
| bool TriplePattern::filter | ( | const Triple & | triple | ) | const |
- Parameters
-
triple a triple query.
- Returns
- true if the triple matches this pattern.
Definition at line 247 of file TriplePattern.cpp.
◆ filter() [2/2]
| bool knowrob::TriplePattern::filter | ( | const Triple & | triple | ) | const |
- Parameters
-
triple a triple query.
- Returns
- true if the triple matches this pattern.
◆ getGraphTerm() [1/2]
|
staticprotected |
Definition at line 135 of file TriplePattern.cpp.
◆ getGraphTerm() [2/2]
|
staticprotected |
◆ getRDFPredicate() [1/6]
|
static |
Definition at line 154 of file TriplePattern.cpp.
◆ getRDFPredicate() [2/6]
|
static |
◆ getRDFPredicate() [3/6]
|
staticprotected |
Definition at line 150 of file TriplePattern.cpp.
◆ getRDFPredicate() [4/6]
|
staticprotected |
◆ getRDFPredicate() [5/6]
Definition at line 166 of file TriplePattern.cpp.
◆ getRDFPredicate() [6/6]
|
staticprotected |
◆ getTripleFrame() [1/2]
| void TriplePattern::getTripleFrame | ( | GraphSelector & | frame | ) | const |
Apply this pattern to a frame.
- Parameters
-
frame a triple frame.
Definition at line 111 of file TriplePattern.cpp.
◆ getTripleFrame() [2/2]
| void knowrob::TriplePattern::getTripleFrame | ( | GraphSelector & | frame | ) | const |
Apply this pattern to a frame.
- Parameters
-
frame a triple frame.
◆ getVariables() [1/2]
| std::vector< VariablePtr > TriplePattern::getVariables | ( | bool | includeObjectVar = true | ) | const |
- Returns
- the variables in this expression.
Definition at line 182 of file TriplePattern.cpp.
◆ getVariables() [2/2]
| std::vector<VariablePtr> knowrob::TriplePattern::getVariables | ( | bool | includeObjectVar = true | ) | const |
- Returns
- the variables in this expression.
◆ graphTerm() [1/2]
|
inline |
◆ graphTerm() [2/2]
|
inline |
◆ instantiateInto() [1/2]
| bool TriplePattern::instantiateInto | ( | Triple & | triple, |
| const std::shared_ptr< const Bindings > & | bindings = Bindings::emptyBindings() |
||
| ) | const |
Map the instantiation of this expression into a triple.
- Parameters
-
triple the triple to be instantiated. bindings the substitution to be applied.
- Returns
- true if the instantiation was successful.
Definition at line 286 of file TriplePattern.cpp.
◆ instantiateInto() [2/2]
| bool knowrob::TriplePattern::instantiateInto | ( | Triple & | triple, |
| const std::shared_ptr< const Bindings > & | bindings = Bindings::emptyBindings() |
||
| ) | const |
Map the instantiation of this expression into a triple.
- Parameters
-
triple the triple to be instantiated. bindings the substitution to be applied.
- Returns
- true if the instantiation was successful.
◆ isOccasionalTerm() [1/2]
|
inline |
◆ isOccasionalTerm() [2/2]
|
inline |
◆ isOptional() [1/2]
|
inline |
◆ isOptional() [2/2]
|
inline |
◆ isUncertainTerm() [1/2]
|
inline |
◆ isUncertainTerm() [2/2]
|
inline |
◆ numVariables() [1/2]
|
overridevirtual |
- Returns
- the number of variables in this expression.
Reimplemented from knowrob::FirstOrderLiteral.
Definition at line 202 of file TriplePattern.cpp.
◆ numVariables() [2/2]
|
overridevirtual |
- Returns
- the number of variables in this expression.
Reimplemented from knowrob::FirstOrderLiteral.
◆ objectOperator() [1/2]
|
inline |
◆ objectOperator() [2/2]
|
inline |
◆ objectTerm() [1/2]
|
inline |
◆ objectTerm() [2/2]
|
inline |
◆ objectVariable() [1/2]
|
inline |
- Returns
- an additional object variable to bind the actual value of the object term.
Definition at line 108 of file TriplePattern.h.
◆ objectVariable() [2/2]
|
inline |
- Returns
- an additional object variable to bind the actual value of the object term.
Definition at line 108 of file TriplePattern.h.
◆ perspectiveTerm() [1/2]
|
inline |
◆ perspectiveTerm() [2/2]
|
inline |
◆ propertyTerm() [1/2]
|
inline |
◆ propertyTerm() [2/2]
|
inline |
◆ setBeginTerm() [1/2]
|
inline |
Set the begin term of this expression.
- Parameters
-
beginTerm the begin term.
Definition at line 153 of file TriplePattern.h.
◆ setBeginTerm() [2/2]
|
inline |
Set the begin term of this expression.
- Parameters
-
beginTerm the begin term.
Definition at line 153 of file TriplePattern.h.
◆ setConfidenceTerm() [1/2]
|
inline |
Set the confidence term of this expression.
- Parameters
-
confidenceTerm the confidence term.
Definition at line 175 of file TriplePattern.h.
◆ setConfidenceTerm() [2/2]
|
inline |
Set the confidence term of this expression.
- Parameters
-
confidenceTerm the confidence term.
Definition at line 175 of file TriplePattern.h.
◆ setEndTerm() [1/2]
|
inline |
Set the end term of this expression.
- Parameters
-
endTerm the end term.
Definition at line 164 of file TriplePattern.h.
◆ setEndTerm() [2/2]
|
inline |
Set the end term of this expression.
- Parameters
-
endTerm the end term.
Definition at line 164 of file TriplePattern.h.
◆ setGraphName() [1/2]
|
inline |
Set the graph term of this expression.
- Parameters
-
graphName the name of the graph.
Definition at line 131 of file TriplePattern.h.
◆ setGraphName() [2/2]
|
inline |
Set the graph term of this expression.
- Parameters
-
graphName the name of the graph.
Definition at line 131 of file TriplePattern.h.
◆ setGraphTerm() [1/2]
|
inline |
Set the graph term of this expression.
- Parameters
-
graphTerm the graph term.
Definition at line 125 of file TriplePattern.h.
◆ setGraphTerm() [2/2]
|
inline |
Set the graph term of this expression.
- Parameters
-
graphTerm the graph term.
Definition at line 125 of file TriplePattern.h.
◆ setIsOccasionalTerm() [1/2]
|
inline |
Set the isOccasional term of this expression.
- Parameters
-
isOccasional the isOccasional term.
Definition at line 197 of file TriplePattern.h.
◆ setIsOccasionalTerm() [2/2]
|
inline |
Set the isOccasional term of this expression.
- Parameters
-
isOccasional the isOccasional term.
Definition at line 197 of file TriplePattern.h.
◆ setIsOptional() [1/2]
|
inline |
Set this expression to be optional.
- Parameters
-
isOptional true if this expression is optional.
Definition at line 219 of file TriplePattern.h.
◆ setIsOptional() [2/2]
|
inline |
Set this expression to be optional.
- Parameters
-
isOptional true if this expression is optional.
Definition at line 219 of file TriplePattern.h.
◆ setIsUncertainTerm() [1/2]
|
inline |
Set the isUncertain term of this expression.
- Parameters
-
isUncertain the isUncertain term.
Definition at line 208 of file TriplePattern.h.
◆ setIsUncertainTerm() [2/2]
|
inline |
Set the isUncertain term of this expression.
- Parameters
-
isUncertain the isUncertain term.
Definition at line 208 of file TriplePattern.h.
◆ setObjectOperator() [1/2]
|
inline |
Set the operator for the object of the triple.
- Parameters
-
objectOperator the operator.
Definition at line 186 of file TriplePattern.h.
◆ setObjectOperator() [2/2]
|
inline |
Set the operator for the object of the triple.
- Parameters
-
objectOperator the operator.
Definition at line 186 of file TriplePattern.h.
◆ setObjectTerm() [1/2]
|
inline |
Set the object term of this expression.
- Parameters
-
objectTerm the object term.
Definition at line 103 of file TriplePattern.h.
◆ setObjectTerm() [2/2]
|
inline |
Set the object term of this expression.
- Parameters
-
objectTerm the object term.
Definition at line 103 of file TriplePattern.h.
◆ setObjectVariable() [1/2]
|
inline |
Set the object variable of this expression.
- Parameters
-
objectVariable the object variable.
Definition at line 114 of file TriplePattern.h.
◆ setObjectVariable() [2/2]
|
inline |
Set the object variable of this expression.
- Parameters
-
objectVariable the object variable.
Definition at line 114 of file TriplePattern.h.
◆ setPerspectiveTerm() [1/2]
|
inline |
Set the agent term of this expression.
- Parameters
-
perspectiveTerm the perspective term.
Definition at line 142 of file TriplePattern.h.
◆ setPerspectiveTerm() [2/2]
|
inline |
Set the agent term of this expression.
- Parameters
-
perspectiveTerm the perspective term.
Definition at line 142 of file TriplePattern.h.
◆ setSubjectTerm() [1/2]
|
inline |
Set the subject term of this expression.
- Parameters
-
subjectTerm the subject term.
Definition at line 87 of file TriplePattern.h.
◆ setSubjectTerm() [2/2]
|
inline |
Set the subject term of this expression.
- Parameters
-
subjectTerm the subject term.
Definition at line 87 of file TriplePattern.h.
◆ setTripleFrame() [1/2]
| void TriplePattern::setTripleFrame | ( | const GraphSelector & | frame | ) |
Apply a frame to this pattern.
- Parameters
-
frame a triple frame.
Definition at line 87 of file TriplePattern.cpp.
◆ setTripleFrame() [2/2]
| void knowrob::TriplePattern::setTripleFrame | ( | const GraphSelector & | frame | ) |
Apply a frame to this pattern.
- Parameters
-
frame a triple frame.
◆ subjectTerm() [1/2]
|
inline |
◆ subjectTerm() [2/2]
|
inline |
Member Data Documentation
◆ beginTerm_
|
protected |
Definition at line 259 of file TriplePattern.h.
◆ confidenceTerm_
|
protected |
Definition at line 261 of file TriplePattern.h.
◆ endTerm_
|
protected |
Definition at line 260 of file TriplePattern.h.
◆ graphTerm_
|
protected |
Definition at line 257 of file TriplePattern.h.
◆ isOccasional_
|
protected |
Definition at line 262 of file TriplePattern.h.
◆ isOptional_
|
protected |
Definition at line 254 of file TriplePattern.h.
◆ isUncertain_
|
protected |
Definition at line 263 of file TriplePattern.h.
◆ objectOperator_
|
protected |
Definition at line 253 of file TriplePattern.h.
◆ objectTerm_
|
protected |
Definition at line 251 of file TriplePattern.h.
◆ objectVariable_
|
protected |
Definition at line 252 of file TriplePattern.h.
◆ perspectiveTerm_
|
protected |
Definition at line 258 of file TriplePattern.h.
◆ propertyTerm_
|
protected |
Definition at line 250 of file TriplePattern.h.
◆ subjectTerm_
|
protected |
Definition at line 249 of file TriplePattern.h.
The documentation for this class was generated from the following files:
- build/_CPack_Packages/Linux/DEB/knowrob-2.1.0-Linux/usr/include/knowrob/semweb/TriplePattern.h
- src/semweb/TriplePattern.cpp