#include <TokenStream.h>
Classes | |
| class | Channel |
Public Member Functions | |
| TokenStream () | |
| virtual | ~TokenStream () |
| TokenStream (const TokenStream &)=delete | |
| virtual void | close () |
| bool | isOpened () const |
| TokenStream () | |
| virtual | ~TokenStream () |
| TokenStream (const TokenStream &)=delete | |
| virtual void | close () |
| bool | isOpened () const |
Protected Member Functions | |
| virtual void | push (Channel &channel, const TokenPtr &tok) |
| virtual void | push (const TokenPtr &tok)=0 |
| virtual void | push (Channel &channel, const TokenPtr &tok) |
| virtual void | push (const TokenPtr &tok)=0 |
Protected Attributes | |
| std::list< std::shared_ptr< Channel > > | channels_ |
| std::atomic< bool > | isOpened_ |
| std::mutex | channel_mutex_ |
Detailed Description
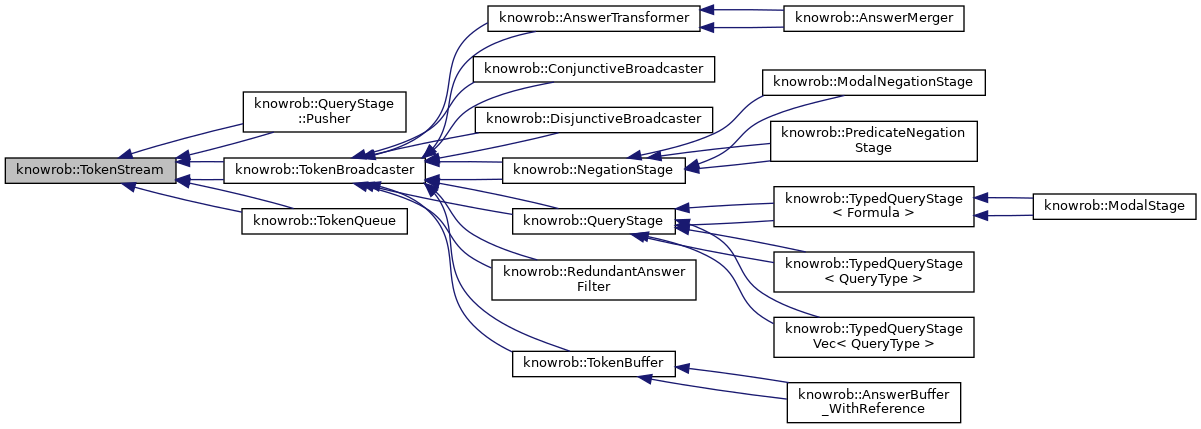
A stream of query results. The only way to write to a stream is by creating a channel.
Definition at line 22 of file TokenStream.h.
Constructor & Destructor Documentation
◆ TokenStream() [1/4]
| TokenStream::TokenStream | ( | ) |
Definition at line 17 of file TokenStream.cpp.
◆ ~TokenStream() [1/2]
|
virtual |
Definition at line 20 of file TokenStream.cpp.
◆ TokenStream() [2/4]
|
delete |
Cannot be copy-assigned.
◆ TokenStream() [3/4]
| knowrob::TokenStream::TokenStream | ( | ) |
◆ ~TokenStream() [2/2]
|
virtual |
◆ TokenStream() [4/4]
|
delete |
Cannot be copy-assigned.
Member Function Documentation
◆ close() [1/2]
|
virtual |
Close the stream. This will push an EOS message, and all future attempts to push a non EOS message will cause a warning. Once closed, a stream cannot be opened again. Note that a stream auto-closes once it has received EOS messages from all of its input channels.
Reimplemented in knowrob::QueryStage::Pusher, knowrob::QueryStage, knowrob::QueryStage::Pusher, and knowrob::QueryStage.
Definition at line 24 of file TokenStream.cpp.
◆ close() [2/2]
|
virtual |
Close the stream. This will push an EOS message, and all future attempts to push a non EOS message will cause a warning. Once closed, a stream cannot be opened again. Note that a stream auto-closes once it has received EOS messages from all of its input channels.
Reimplemented in knowrob::QueryStage::Pusher, knowrob::QueryStage, knowrob::QueryStage::Pusher, and knowrob::QueryStage.
◆ isOpened() [1/2]
| bool TokenStream::isOpened | ( | ) | const |
- Returns
- true if opened.
Definition at line 44 of file TokenStream.cpp.
◆ isOpened() [2/2]
| bool knowrob::TokenStream::isOpened | ( | ) | const |
- Returns
- true if opened.
◆ push() [1/4]
Reimplemented in knowrob::ConjunctiveBroadcaster, and knowrob::ConjunctiveBroadcaster.
Definition at line 48 of file TokenStream.cpp.
◆ push() [2/4]
|
protectedvirtual |
Reimplemented in knowrob::ConjunctiveBroadcaster, and knowrob::ConjunctiveBroadcaster.
◆ push() [3/4]
|
protectedpure virtual |
Implemented in knowrob::TokenQueue, knowrob::TokenBuffer, knowrob::TokenBroadcaster, knowrob::RedundantAnswerFilter, knowrob::QueryStage, knowrob::QueryStage::Pusher, knowrob::AnswerTransformer, knowrob::TokenQueue, knowrob::TokenBuffer, knowrob::TokenBroadcaster, knowrob::RedundantAnswerFilter, knowrob::QueryStage, knowrob::QueryStage::Pusher, knowrob::AnswerTransformer, knowrob::DisjunctiveBroadcaster, and knowrob::DisjunctiveBroadcaster.
◆ push() [4/4]
|
protectedpure virtual |
Implemented in knowrob::TokenQueue, knowrob::TokenBuffer, knowrob::TokenBroadcaster, knowrob::RedundantAnswerFilter, knowrob::QueryStage, knowrob::QueryStage::Pusher, knowrob::AnswerTransformer, knowrob::TokenQueue, knowrob::TokenBuffer, knowrob::TokenBroadcaster, knowrob::RedundantAnswerFilter, knowrob::QueryStage, knowrob::QueryStage::Pusher, knowrob::AnswerTransformer, knowrob::DisjunctiveBroadcaster, and knowrob::DisjunctiveBroadcaster.
Member Data Documentation
◆ channel_mutex_
|
protected |
Definition at line 120 of file TokenStream.h.
◆ channels_
|
protected |
Definition at line 118 of file TokenStream.h.
◆ isOpened_
|
protected |
Definition at line 119 of file TokenStream.h.
The documentation for this class was generated from the following files:
- build/_CPack_Packages/Linux/DEB/knowrob-2.1.0-Linux/usr/include/knowrob/queries/TokenStream.h
- src/queries/TokenStream.cpp